前言#
飞行机器人研究与应用发展路径#
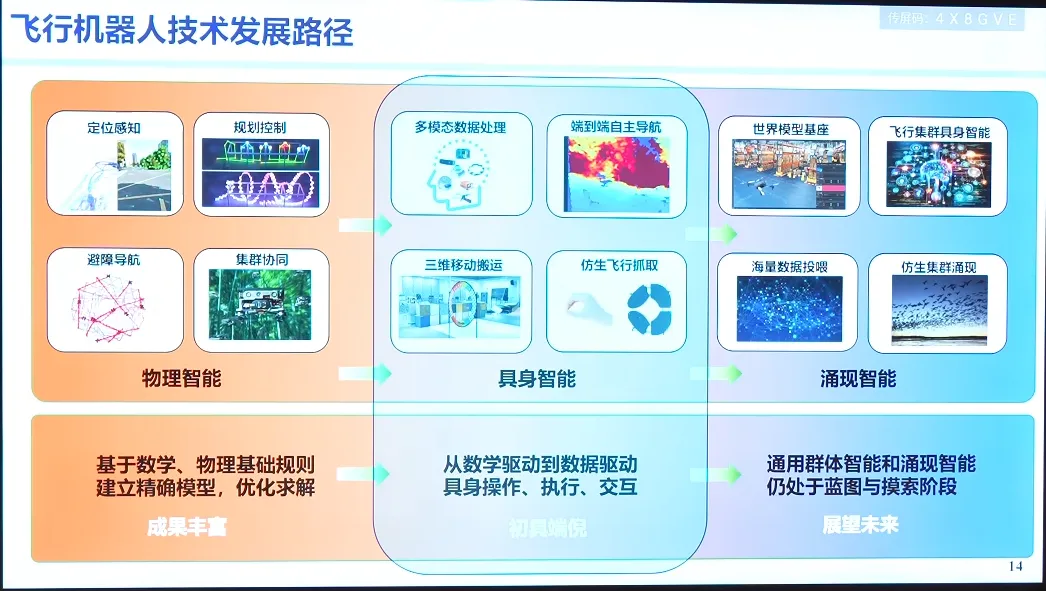
现阶段:都是飞来飞去采集一些信息,基本仅仅是限制到这部分,不能像双臂机器人等做各种事情。在此之前关于四旋翼无人机都是构建一些模块化的功能性开发,每个模块的开发都是依据一些物理 principle 来构建的,然后构建精巧的数学模型,再设计专门的求解器去优化他,将这种范式总结叫做物理智能。
新的方案:具身智能(上限较高的方案),这个机器人智能体可以主动 collect some data and get some useful information(清洗数据得到一些有用的信息,自己去学习,去 learning to evolution ,从而获得某项技能)

研究思路#
从单体感知决策到集群自主协同,从数学驱动建模优化到数据驱动学习进化。
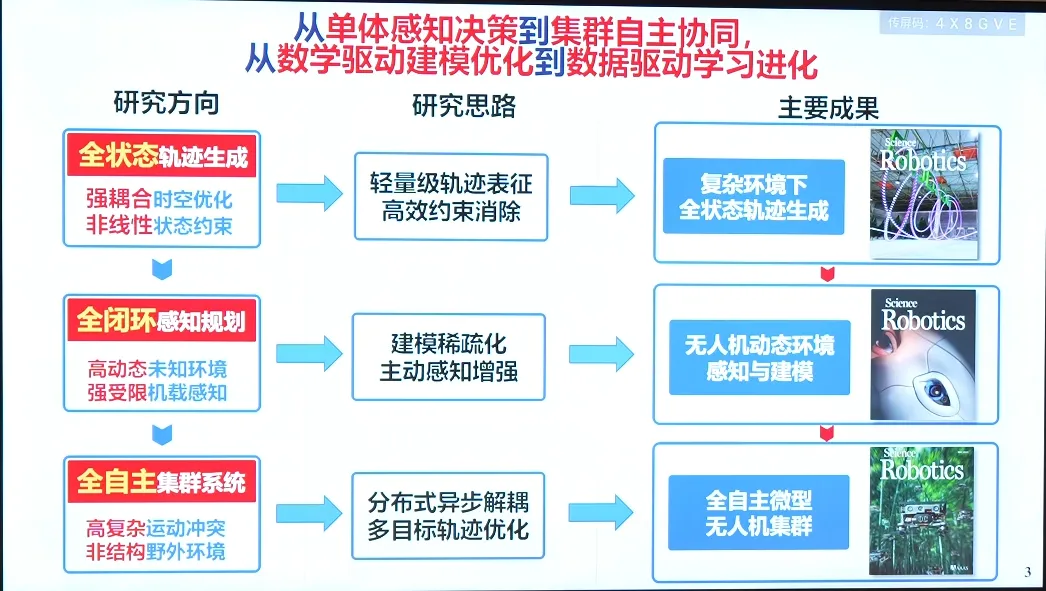
轨迹规划感知:复杂环境下全状态轨迹生成#
- 难点1:建模难精确(扣一个比较精确的几何形状,这个形状可能会非凸,会有最大的保留原始解空间)
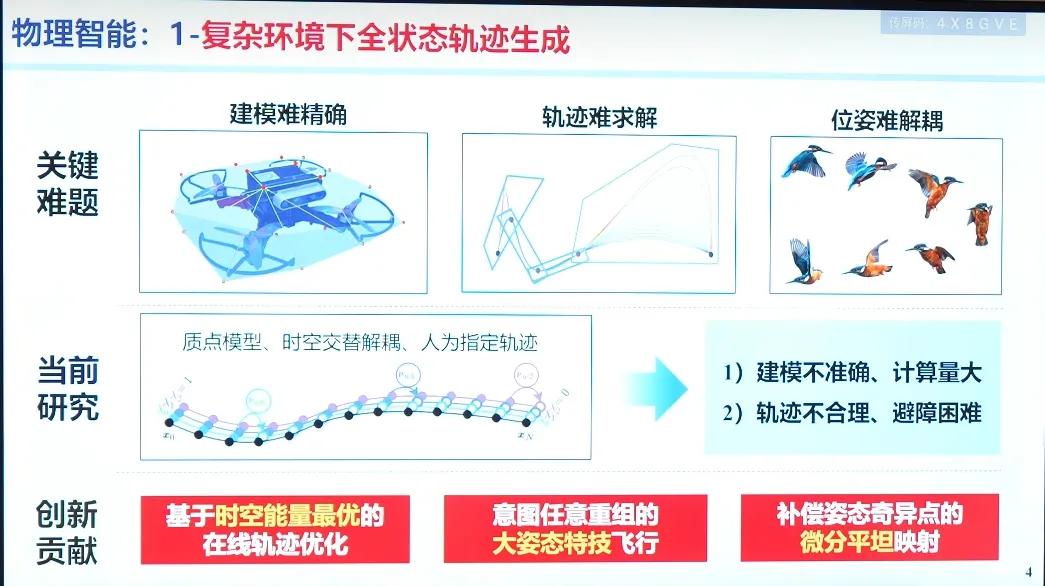
- 难点2:轨迹难求解(要考虑各种各样的约束,非线性约束、耦合的约束等等)
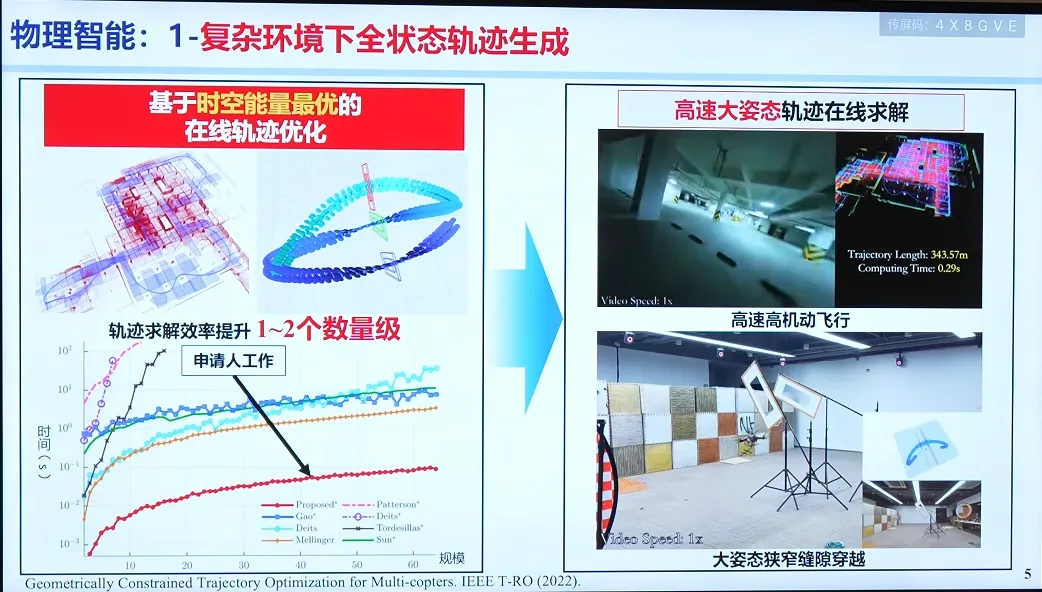
- 难点3:旋翼无人机特定的问题,位姿难解耦。位置和姿态对旋翼无人机来说是一个耦合的元素,但是它在特定的姿态下,就一定会有特定的加速,这个加速就会让我们的位置产生变化,所以位置和姿态是无法分开来做的。
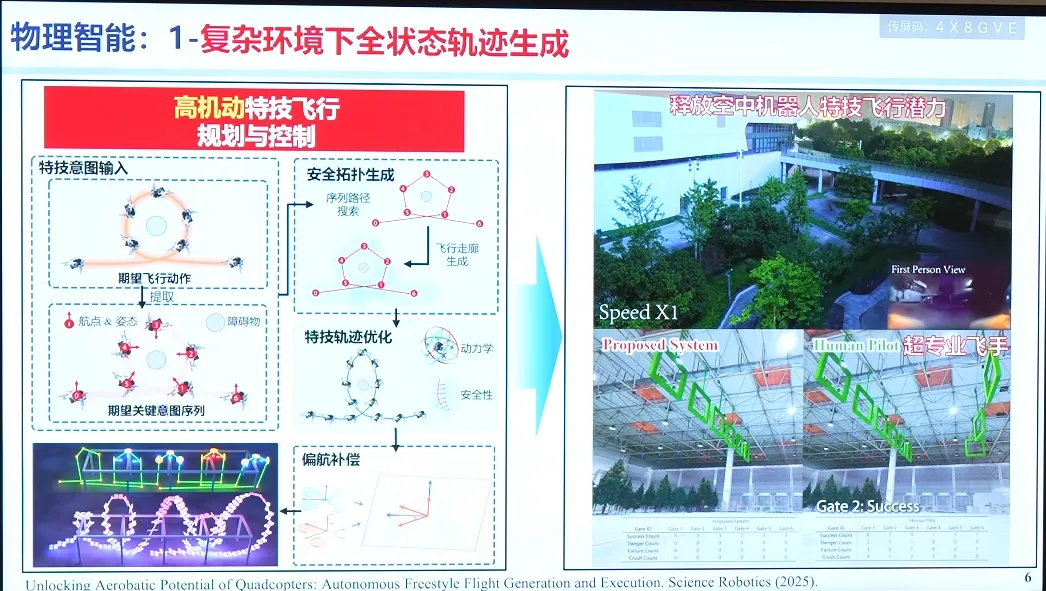
三个难点的对应解决方法:质点模型、时空交替解耦、人为指定轨迹。
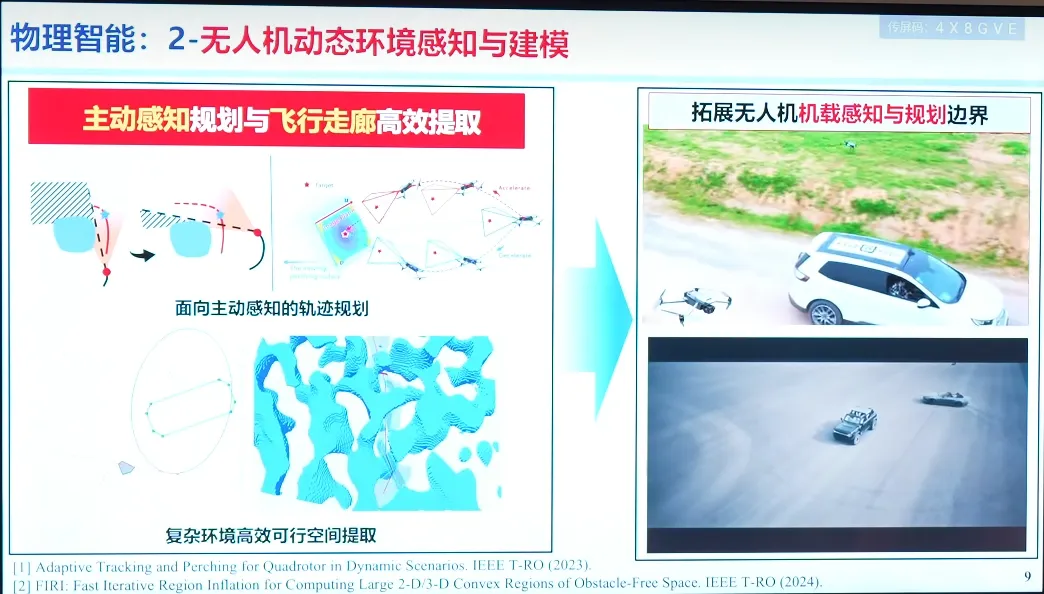
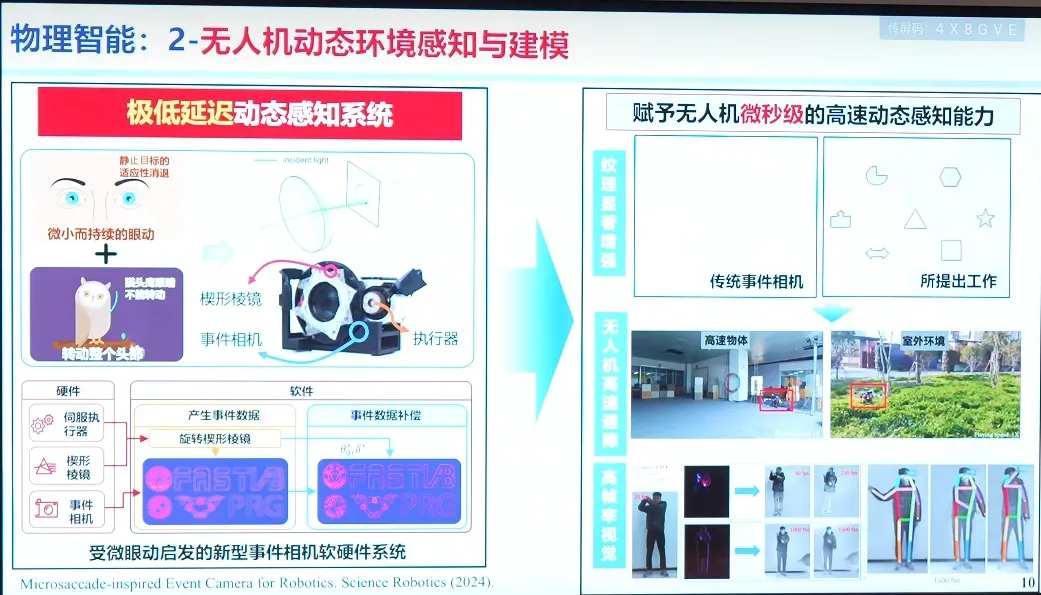
无人机动态环境下的感知规划闭环与建模#
为了实现在复杂情况下从信息采集到规划的整体系统的闭环,就是要实现无人机在各种各样的场景下去飞。
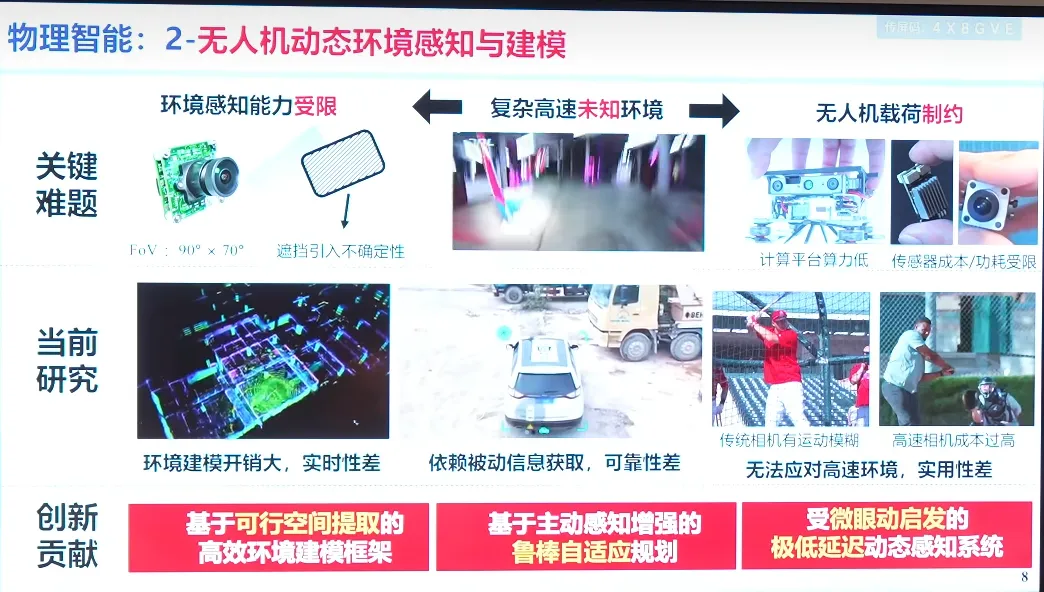
代表性成果:主动感知规划与飞行走廊高效提取(不需要让无人机去知道哪里是障碍物,只需要让无人机知道哪里是free space,就要找到一种障碍物分布的估计)
动态感知(更多的取决于相机的进步,事件相机的使用。但是以事件相机为中心来构建自主导航无人机很难,因为事件相机有他天然的缺陷,所以高飞他们提出的一个方法是增强物体成像的灵敏度,设计了这样的一个相机)
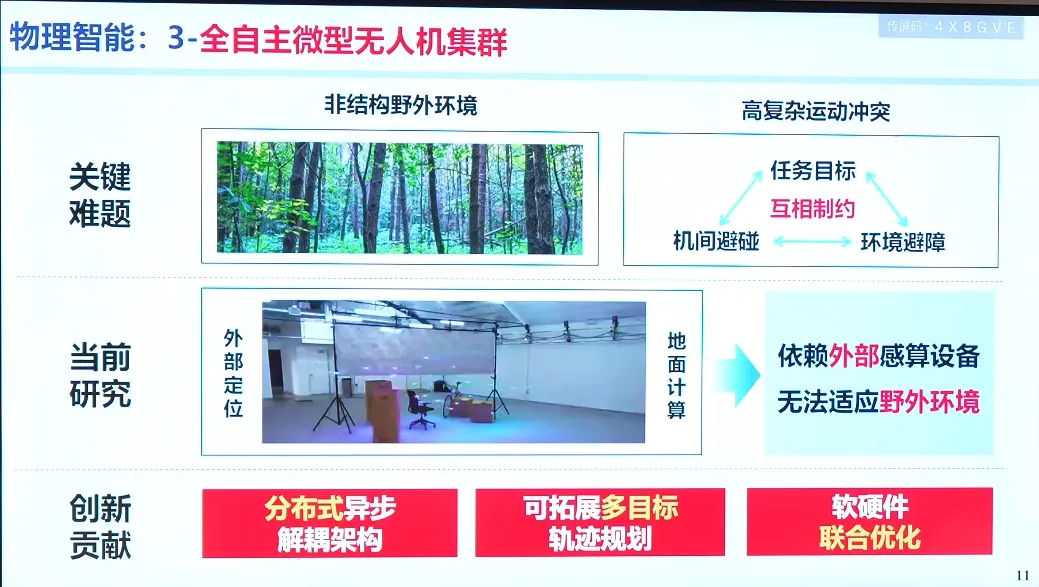
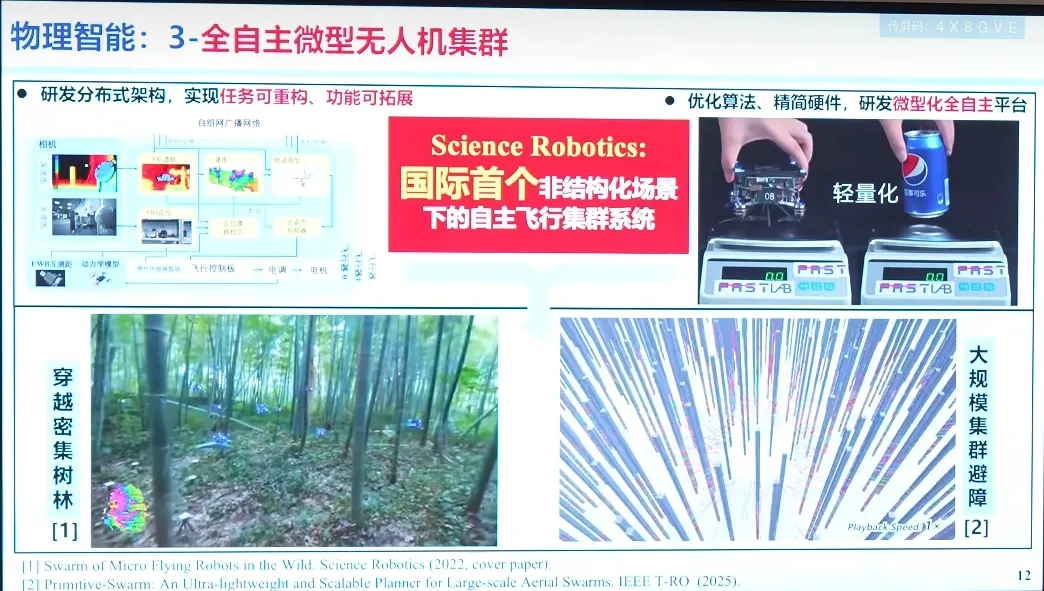
无人机集群的全自主导航#
不依赖外部的设备,也不依赖提前编程,有共同的目标可进行分布式计算。
飞行机器人技术发展路径#
第一个理念就是飞行机器人它智能的获取方式的变化,我们不能让再针对每一个特定的 task 去建立精巧的数学模型,而是我们要设计一个仿真环境一些学习策略,一些信息采集、数据清洗、数据生成的。还有 sim2real 部署的方法,让无人机可以自己习得某项技能。
第二个理念是我们希望他们可以有一些操作交互的能力,可以做更多的具身交互,操作执行理解(例如 VLA 、甚至 VTLA )。
高飞的一些基于这些理念的工作#
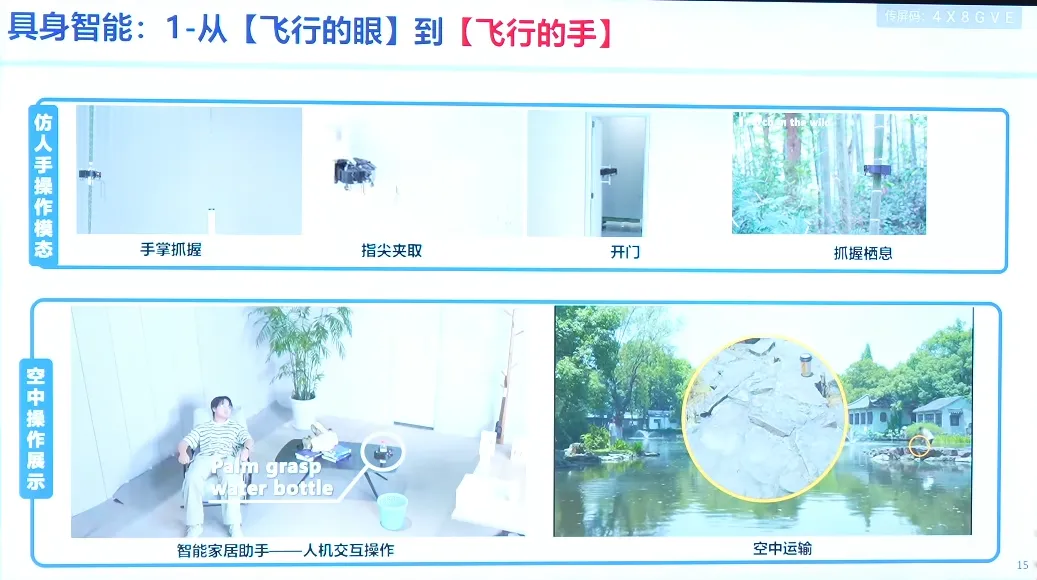
从“飞行的眼”到“飞行的手”(在变形时质心或转动惯量的变化,就会让这个结构的自适应控制较难实现)。
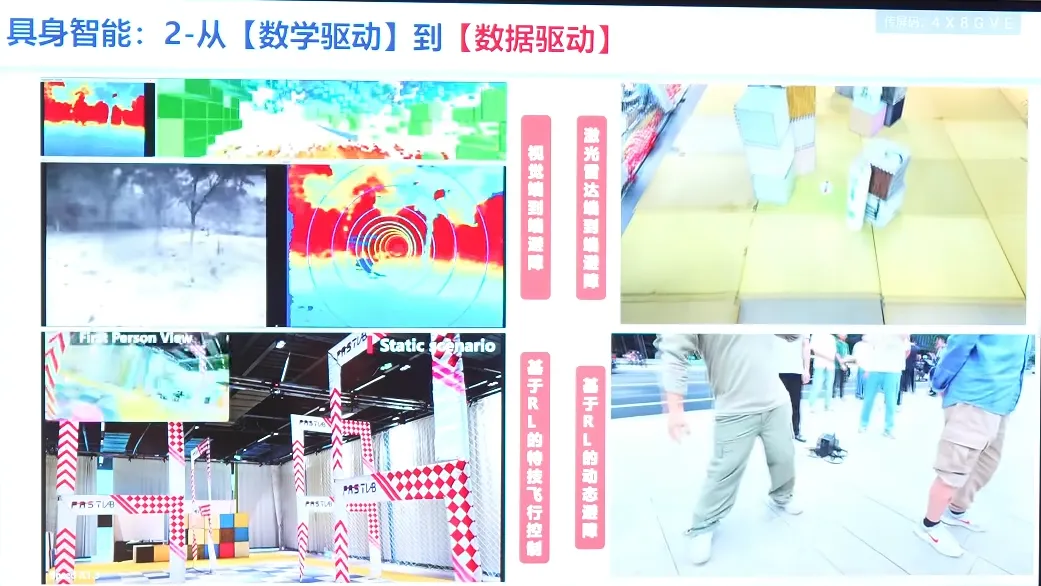
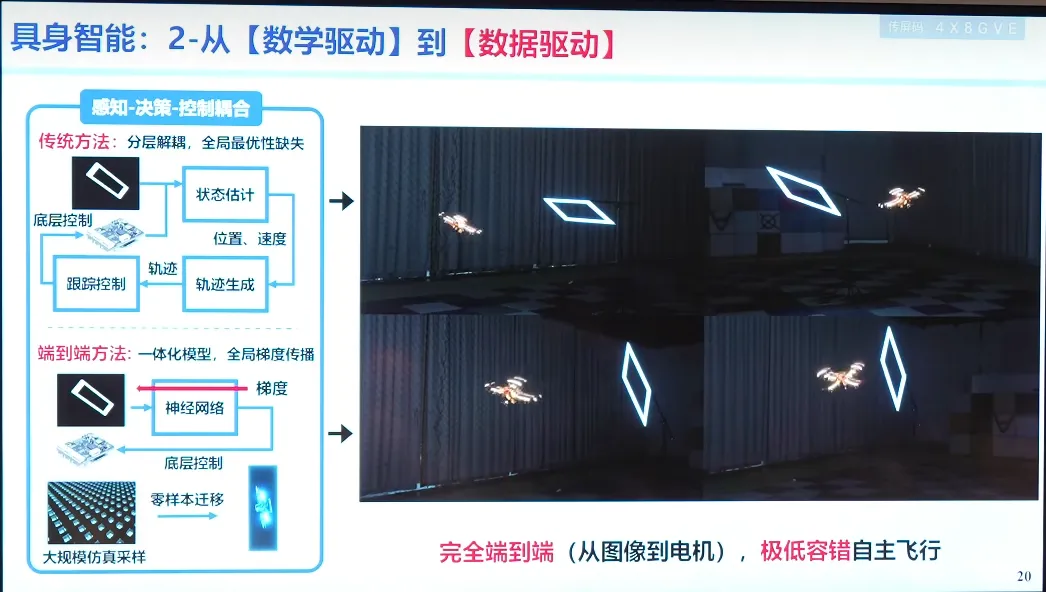
从“数学物理驱动”到“数据驱动”,让机器人习得一个技能,靠神经网络、靠learning、靠强化学习,然后让他能自主导航完成任务(传统路径规划遇到的一个问题,整个轨迹路径的求解本质上就是来解一个离散的组合优化问题或者是一个连续域的一个数值优化问题)。

基于RL的自主导航和避障、用视觉做端到端的RL、激光雷达做端到端的RL和避障、用RL 做特技飞行(某些不是很要求非常精确的控制,反而要求更好的实时性的控制,这些还是交给RL来做好一些)(RL对于控制就像是离线的sampling-based MPC是具备一定的可解释性的,可能在数学上不是很好的证明他的完备性的瑕疵)。