
Paper Reading:Robot learning 2
我要和他们站在一起。
RL-BASED DRONE PAPER READING
Planar Pose Graph#
平面位姿优化的稳定性框架
一种平面位姿优化的稳定性框架。通过将问题解耦后分为两个子问题,并将这两个子问题进行分析后转化为一个线性的问题(相较于原来矩阵式的问题更加简单),最终通过求解这个线性问题来对目标进行优化
Whole-Body Scale Optimization#
 提出一种线性标度的精确全身碰撞公式,同时推导了解析梯度,用于轨迹优化。
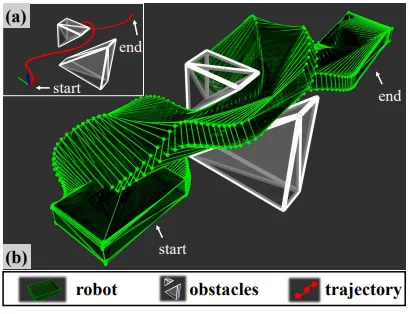
提出一种线性标度的精确全身碰撞公式,同时推导了解析梯度,用于轨迹优化。UAV Payload Transportation#
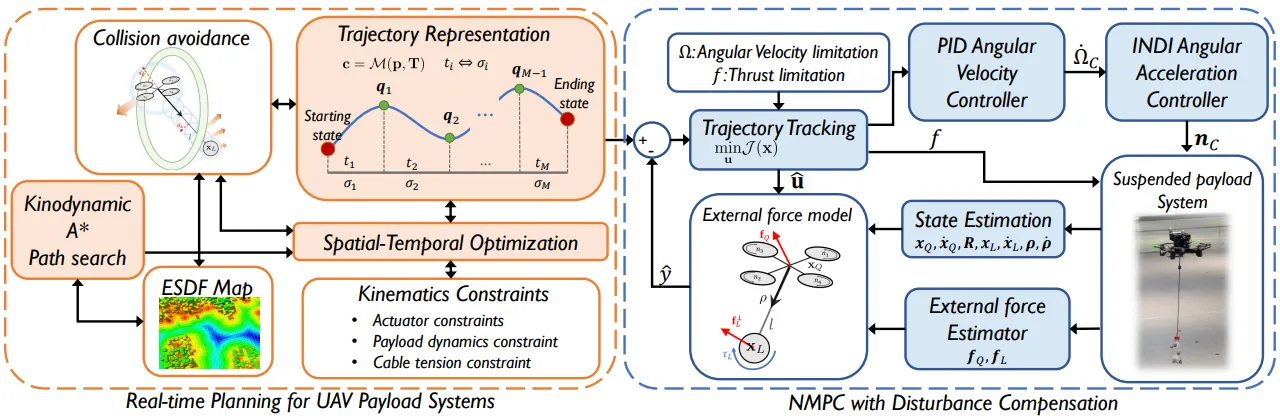 自主无人机在重物运输时对自身姿态和重物姿态的控制,自动消摆。
自主无人机在重物运输时对自身姿态和重物姿态的控制,自动消摆。Robotic Relative Localization#
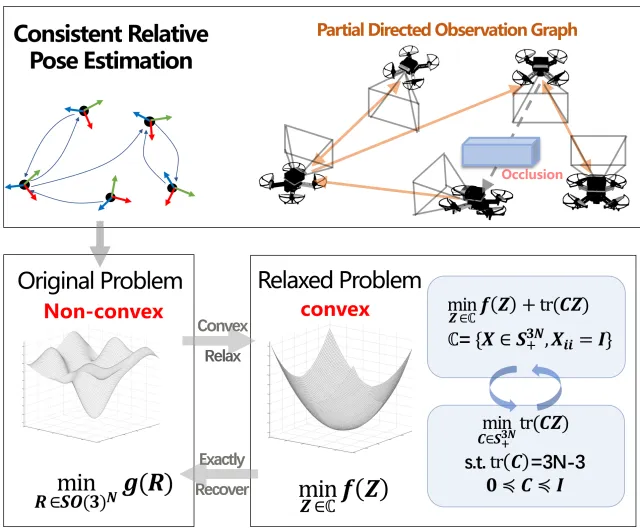 相互观测的机器人群体定位,解决部分相互观测的机器人群体恢复相对位姿,提出了一套稳健的可扩展的算法。
相互观测的机器人群体定位,解决部分相互观测的机器人群体恢复相对位姿,提出了一套稳健的可扩展的算法。Path Planning#
路径规划
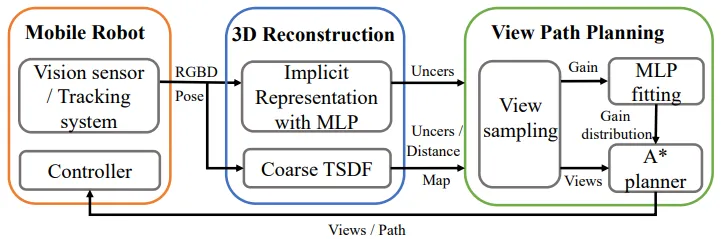 主题:提高自主隐式重建的视图路径规划效率,提升目标图像的重建质量 方法:1、信息增益场近似 2、混合表示法 3、新的路径规划策略。
主题:提高自主隐式重建的视图路径规划效率,提升目标图像的重建质量 方法:1、信息增益场近似 2、混合表示法 3、新的路径规划策略。
GS-Planner#
Gaussian-Splatting-based Planning Framework
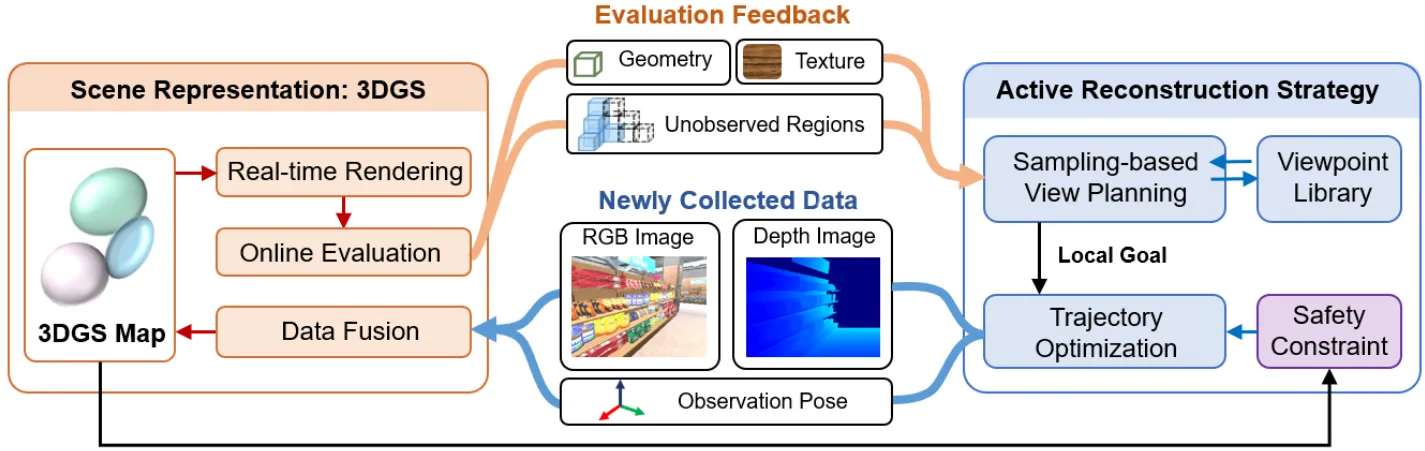 3D高斯重建(建图+路径规划,重点在建图算法):为3D高斯建图提出完整和建图质量的评估方法,也设计基于采样的主动视图规划算法,指导重建未观测区域,提高建图质量
3D高斯重建(建图+路径规划,重点在建图算法):为3D高斯建图提出完整和建图质量的评估方法,也设计基于采样的主动视图规划算法,指导重建未观测区域,提高建图质量
Back to Newton’s Laws#
基于视觉算法的最优控制
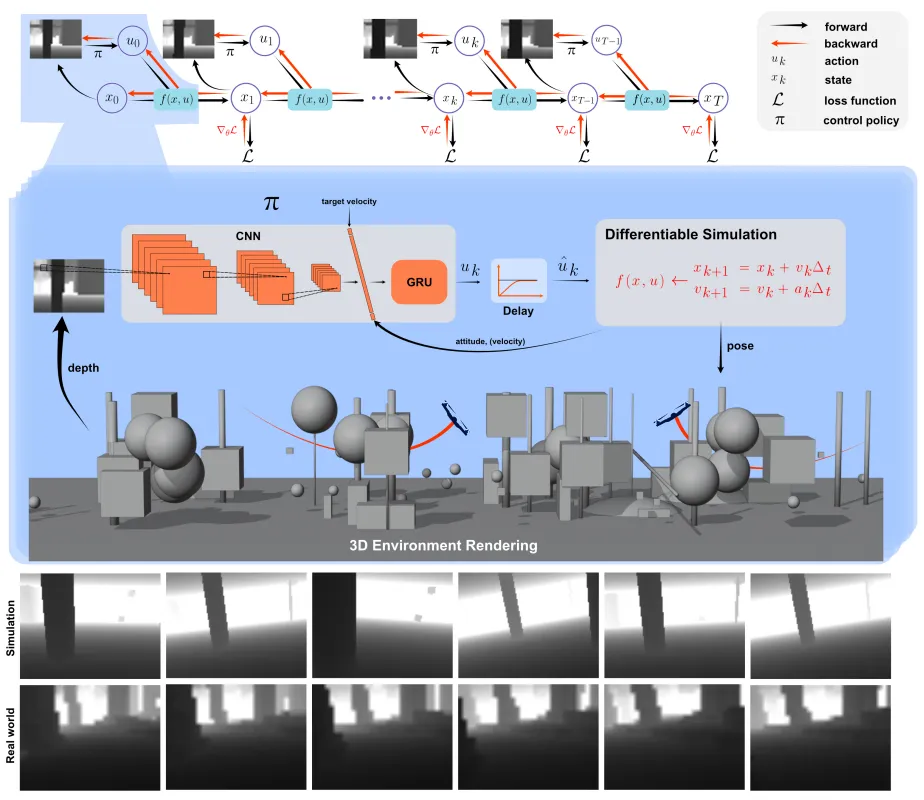 这个不是强化学习领域范围的文章,就像他的名字,回到牛顿的规则之下,用物理的手段实现无人机快速飞行,仍然是基于视觉算法实现的
这个不是强化学习领域范围的文章,就像他的名字,回到牛顿的规则之下,用物理的手段实现无人机快速飞行,仍然是基于视觉算法实现的
ARiADNE#
注意力强化学习方法
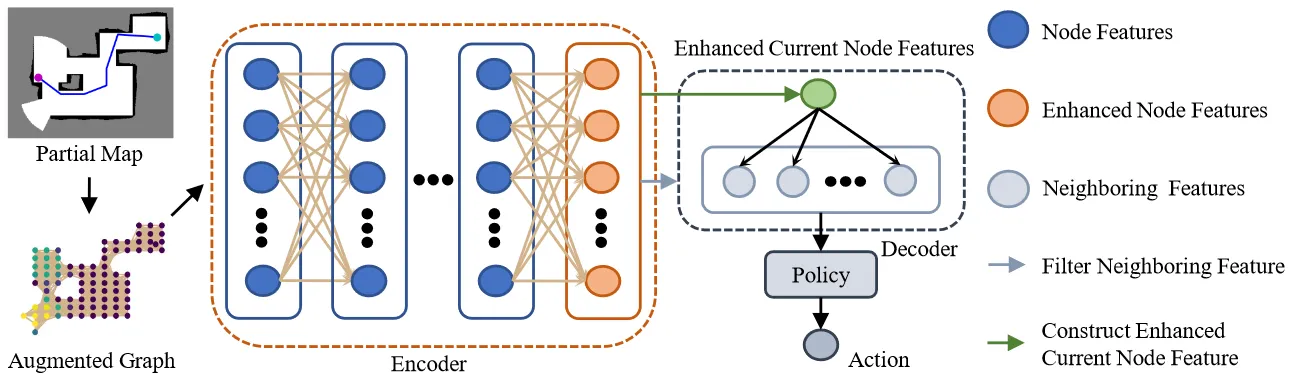 注意力强化学习方法 ARiADNE,用于机器人未知环境自主探索,解决近视规划问题;核心贡献是用注意力网络学习地图多尺度空间依赖,结合 SAC 实现非近视路径决策,探索效率优于前沿法、采样法与 CNN-DRL 基线,ROS 仿真验证实用性。
注意力强化学习方法 ARiADNE,用于机器人未知环境自主探索,解决近视规划问题;核心贡献是用注意力网络学习地图多尺度空间依赖,结合 SAC 实现非近视路径决策,探索效率优于前沿法、采样法与 CNN-DRL 基线,ROS 仿真验证实用性。
CTSAC#
Transformer融合SAC+周期性回顾课程学习+激光雷达聚类优化
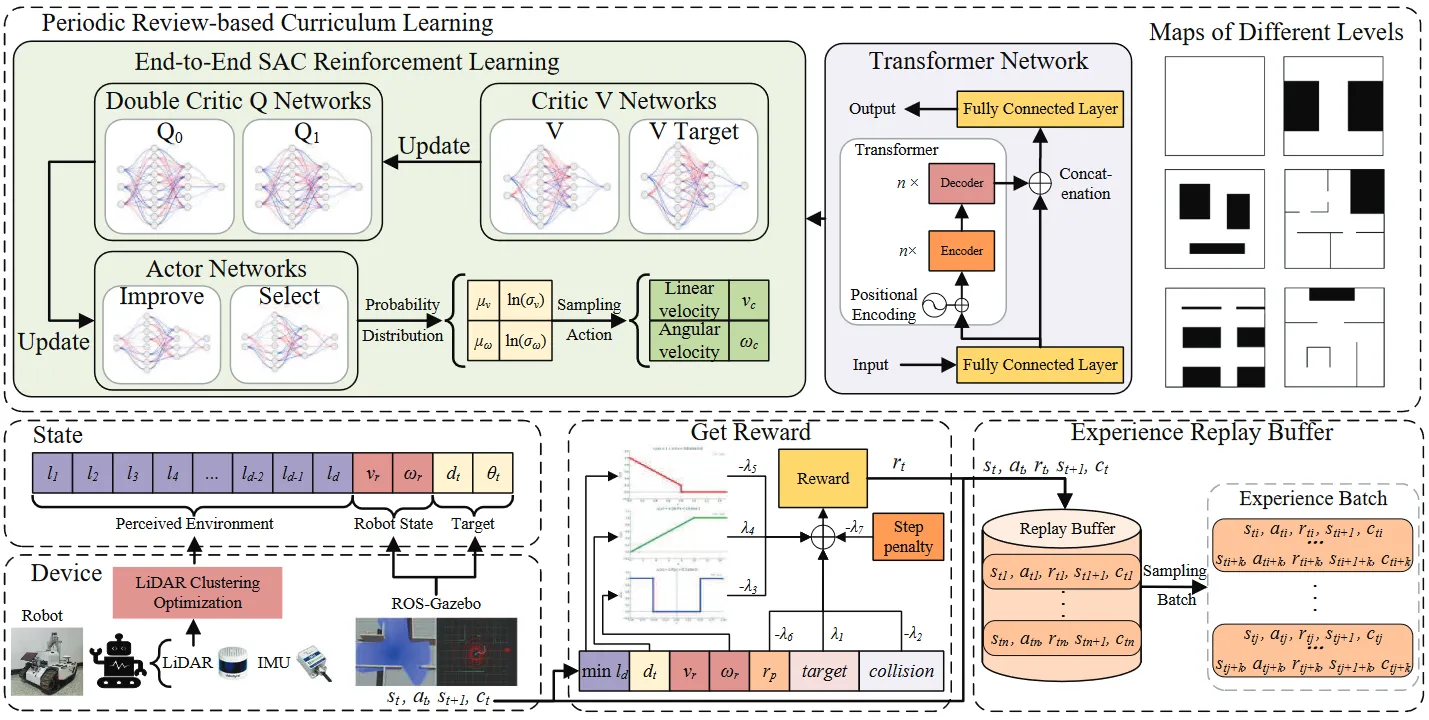 对机器人目标导向自主探索的环境推理弱、收敛慢、仿真-现实迁移难问题,提出CTSAC算法,将Transformer嵌入SAC感知网络以利用历史信息提升策略远见,设计周期性回顾课程学习缓解灾难性遗忘并加速训练,优化激光雷达聚类方式缩小仿真与现实差距,经ROS-Gazebo仿真与实机实验验证,其探索成功率与效率优于传统非学习型和主流学习型算法。
对机器人目标导向自主探索的环境推理弱、收敛慢、仿真-现实迁移难问题,提出CTSAC算法,将Transformer嵌入SAC感知网络以利用历史信息提升策略远见,设计周期性回顾课程学习缓解灾难性遗忘并加速训练,优化激光雷达聚类方式缩小仿真与现实差距,经ROS-Gazebo仿真与实机实验验证,其探索成功率与效率优于传统非学习型和主流学习型算法。
DARE#
扩散策略+注意力图编码器,实现最优专家演示生成探索路径
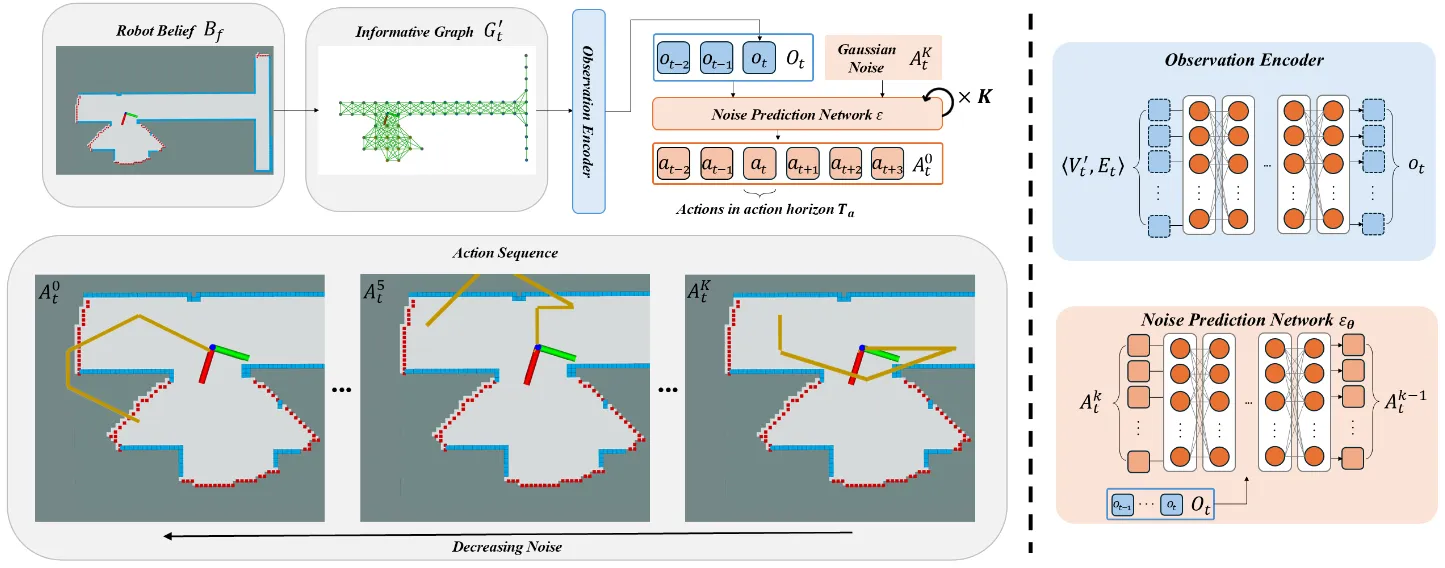 对自主机器人探索提出DARE生成式方法,基于注意力编码器提取环境图特征,以扩散策略网络从专家最优演示中学习探索模式,可依据局部环境信念推理未知区域结构并生成显式长时规划路径,仿真与实机部署结果表明其探索效率比肩主流传统与学习型规划器,具备良好泛化与仿真-现实迁移能力。
对自主机器人探索提出DARE生成式方法,基于注意力编码器提取环境图特征,以扩散策略网络从专家最优演示中学习探索模式,可依据局部环境信念推理未知区域结构并生成显式长时规划路径,仿真与实机部署结果表明其探索效率比肩主流传统与学习型规划器,具备良好泛化与仿真-现实迁移能力。